
")


Routing through Safety Contour
- Sam Graber
-
 Topic Author
Topic Author
- Offline
- New Member
-

Less
More
2 years 4 months ago #2373
by Sam Graber
Routing through Safety Contour was created by Sam Graber
When Creating a Route, qtVlm continues to calculate and plot a course that trangresses my defined Safety contour depth...and even Shallow contour! I can't seem to find a setting in (Alt-R) Options or Advanced Settings that says, "don't create a route that takes the boat into water shoaler than my defined safety contour." Please let me know what I can do to correct, thanks!
Please Log in or Create an account to join the conversation.
- maitai
- Offline
- Administrator
-

Less
More
- Posts: 1260
- Thank you received: 25
2 years 4 months ago #2374
by maitai
Replied by maitai on topic Routing through Safety Contour
Hi Sam,
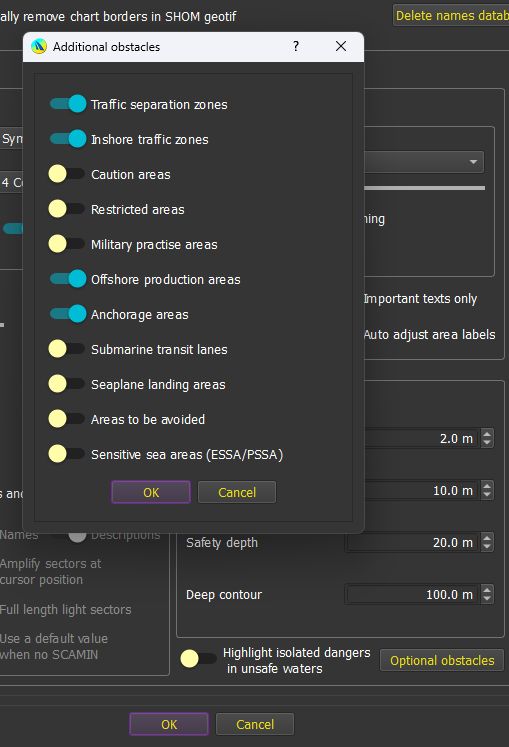
Safety contour is a danger, not an obstacle. Shallow contour is an obstacle and should be avoided by routing. Make sure that
1) Dangers/obstacles by S57 is selected
2) You do have S57 at that place
3) In routing avoid land and barriers is checked.
4) In routing just reset values to default or select automatic setting with quality slider fully to the right
A screenshot might help, as usual
Safety contour is a danger, not an obstacle. Shallow contour is an obstacle and should be avoided by routing. Make sure that
1) Dangers/obstacles by S57 is selected
2) You do have S57 at that place
3) In routing avoid land and barriers is checked.
4) In routing just reset values to default or select automatic setting with quality slider fully to the right
A screenshot might help, as usual
Please Log in or Create an account to join the conversation.
- Sam Graber
-
Topic Author
- Offline
- New Member
-
2 years 4 months ago #2375
by Sam Graber
Replied by Sam Graber on topic Routing through Safety Contour
1) I couldn't find "Dangers/obstacles by S57" in the Routing options menus, Do you mean activating Configuration/Charts/"Coast lines from vector charts S57/63"?
2) Yep.
3) I'd been assigning 0.10nm to Avoid barriers and coasts, but error messages were flashing and blocking routes from being calculated. So I lowered this to 0.05nm. Do you suggest keeping this at 0.00nm?
4) Yes, I've had the Automatic Parameters selected with the slider all the way to the right for Best accuracy.
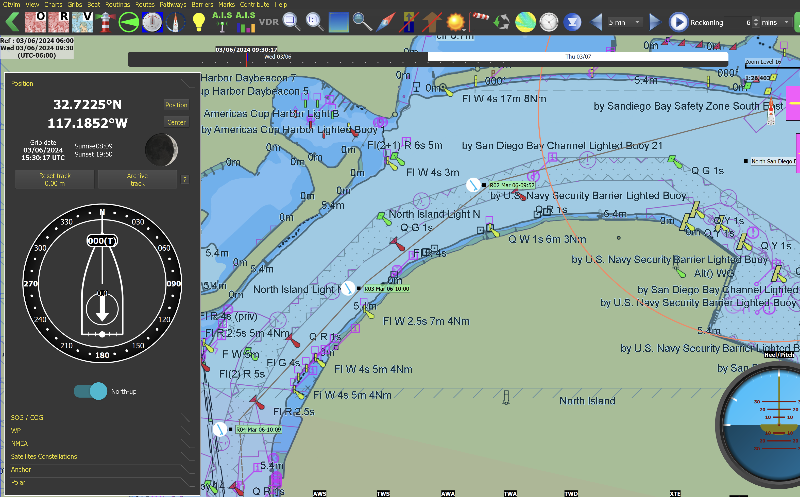
Same starting and finish points. Results with your above 4 areas attended to are...
The routing course is no longer going over Shallow Contours! But it is directly passing over 1 obstruction, 1 dangerous wreck and almost directly over 2 ATONs. The routing course is thick red in those places, as if it knows it's crossing a hazard.
I'm curious if users in practice are leveraging qtVlm as an advanced route planning tool, by first receiving its course calculation, before going in and micro-adjusting the qtVlm route, accounting for currents, hazards, traffic separation lanes, etc.
Meanwhile, I understand the difference between dangers (objects <= Safety Contour) and obstacles (objects <= Shallow Contour), but are you writing that we are not able to have qtVlm calculate routing to avoid Safety Contour? That qtVlm routing will only avoid Shallow Contour? That's cool, users can input their Safety to equal their Shallow, I'm just wondering.
Apologies for loading many questions within this one thread. Overall, I'm trying to understand how others are optimizing qtVlm for practical routing, as this is a big big feature of the program.
Sam
2) Yep.
3) I'd been assigning 0.10nm to Avoid barriers and coasts, but error messages were flashing and blocking routes from being calculated. So I lowered this to 0.05nm. Do you suggest keeping this at 0.00nm?
4) Yes, I've had the Automatic Parameters selected with the slider all the way to the right for Best accuracy.
Same starting and finish points. Results with your above 4 areas attended to are...
The routing course is no longer going over Shallow Contours! But it is directly passing over 1 obstruction, 1 dangerous wreck and almost directly over 2 ATONs. The routing course is thick red in those places, as if it knows it's crossing a hazard.
I'm curious if users in practice are leveraging qtVlm as an advanced route planning tool, by first receiving its course calculation, before going in and micro-adjusting the qtVlm route, accounting for currents, hazards, traffic separation lanes, etc.
Meanwhile, I understand the difference between dangers (objects <= Safety Contour) and obstacles (objects <= Shallow Contour), but are you writing that we are not able to have qtVlm calculate routing to avoid Safety Contour? That qtVlm routing will only avoid Shallow Contour? That's cool, users can input their Safety to equal their Shallow, I'm just wondering.
Apologies for loading many questions within this one thread. Overall, I'm trying to understand how others are optimizing qtVlm for practical routing, as this is a big big feature of the program.
Sam
Please Log in or Create an account to join the conversation.
- maitai
- Offline
- Administrator
-
Less
More
- Posts: 1260
- Thank you received: 25
2 years 4 months ago #2376
by maitai
Replied by maitai on topic Routing through Safety Contour
Routing does not avoid wrecks or ATON or buoys etc (because these are just points without geometry)
You want to be able to cross the safety contour otherwise you will never make it to the marina.
--Philippe
You want to be able to cross the safety contour otherwise you will never make it to the marina.
--Philippe
Please Log in or Create an account to join the conversation.
- Sam Graber
-
Topic Author
- Offline
- New Member
-
2 years 3 months ago #2377
by Sam Graber
Replied by Sam Graber on topic Routing through Safety Contour
=10.0ptWhich marina? ") I haven't used qtVlm to route in Berthing (usage band) charts near any marina slip or mooring spot because we captains should be actively piloting inshore navigation. The first and the final 15 minutes of passages are usually the most complex. But even if I wanted to route to a marina via qtVlm, consider as noted herein and as seen in the example screenshot
I haven't used qtVlm to route in Berthing (usage band) charts near any marina slip or mooring spot because we captains should be actively piloting inshore navigation. The first and the final 15 minutes of passages are usually the most complex. But even if I wanted to route to a marina via qtVlm, consider as noted herein and as seen in the example screenshot
 that qtVlm routing doesn't properly account for fairway, narrow channel and traffic separation lane rules. That’s a problem. Meanwhile, I don’t understand what “points without geometry” means but qtVlm routing taking a boat right over ATONs and other real-world obstructions is also impractical. Third, unless I missed something, currents aren’t factored into qtVlm route planning.=10.0ptSo I've been creating routes in qtVlm using terminus points that mark channel entrances, such as lighted bell buoys. My routes cross relatively open waters.=10.0ptWhich is why I do not want my routes to cross the Safety Contour. My primary question for this thread still stands - are we not able to have qtVlm calculate routing to avoid crossing the user-defined Safety Contour?
that qtVlm routing doesn't properly account for fairway, narrow channel and traffic separation lane rules. That’s a problem. Meanwhile, I don’t understand what “points without geometry” means but qtVlm routing taking a boat right over ATONs and other real-world obstructions is also impractical. Third, unless I missed something, currents aren’t factored into qtVlm route planning.=10.0ptSo I've been creating routes in qtVlm using terminus points that mark channel entrances, such as lighted bell buoys. My routes cross relatively open waters.=10.0ptWhich is why I do not want my routes to cross the Safety Contour. My primary question for this thread still stands - are we not able to have qtVlm calculate routing to avoid crossing the user-defined Safety Contour?
I haven't used qtVlm to route in Berthing (usage band) charts near any marina slip or mooring spot because we captains should be actively piloting inshore navigation. The first and the final 15 minutes of passages are usually the most complex. But even if I wanted to route to a marina via qtVlm, consider as noted herein and as seen in the example screenshot
Please Log in or Create an account to join the conversation.
- maitai
- Offline
- Administrator
-
Less
More
- Posts: 1260
- Thank you received: 25
2 years 3 months ago #2378
by maitai
Replied by maitai on topic Routing through Safety Contour
Once more:
Routing is not designed for that kind of approach. You use routing when traveling on long distances. Do you really expect the routing to avoid a low here? A route is much better, and in that case a pathway with with a safety check envelope is probably even better, and will account for obstacles that are points.
Routing is not designed for that kind of approach. You use routing when traveling on long distances. Do you really expect the routing to avoid a low here? A route is much better, and in that case a pathway with with a safety check envelope is probably even better, and will account for obstacles that are points.
Wrong. Please read documentationqtVlm routing doesn't properly account for fairway, narrow channel and traffic separation lane rules.
Wrong. You are indeed missing something. Load a grib with currents or force currents.Third, unless I missed something, currents aren’t factored into qtVlm route planning.
Safety contour is not an obstacle. If you want to have a shallow contour at 20m it is your decision.we not able to have qtVlm calculate routing to avoid crossing the user-defined Safety Contour?
Please Log in or Create an account to join the conversation.
Time to create page: 0.129 seconds